坐标系定义
1. 概述
本说明中包含机器人世界坐标系定义、机器人坐标系定义、图像坐标系定义。
2. 世界坐标系
| 轴定义 | 含义 |
|---|---|
| X | 机器人开机启动时,此时机器人正方向为世界坐标系X轴正方向 |
| Y | 机器人开机启动时,以右手坐标系定义机器人左侧垂直方向为世界坐标系Y轴正方向 |
| Z | 机器人开机启动时,机器人垂直地面向上方向为世界坐标系Z轴正方向 |
| 原点 | 机器人开机启动时,此时机器人底盘两轮中心点为世界坐标系原点 |
3. 机器人坐标系
| 轴定义 | 含义 |
|---|---|
| X | 当前机器人正方向为机器人坐标系X轴正方向 |
| Y | 以右手坐标系定义机器人左侧垂直方向为机器人坐标系Y轴正方向 |
| Z | 当前机器人垂直地面向上方向为机器人坐标系Z轴正方向 |
| 原点 | 当前机器人底盘两轮中心点为机器人坐标系原点 |
4. 机器人手臂坐标系
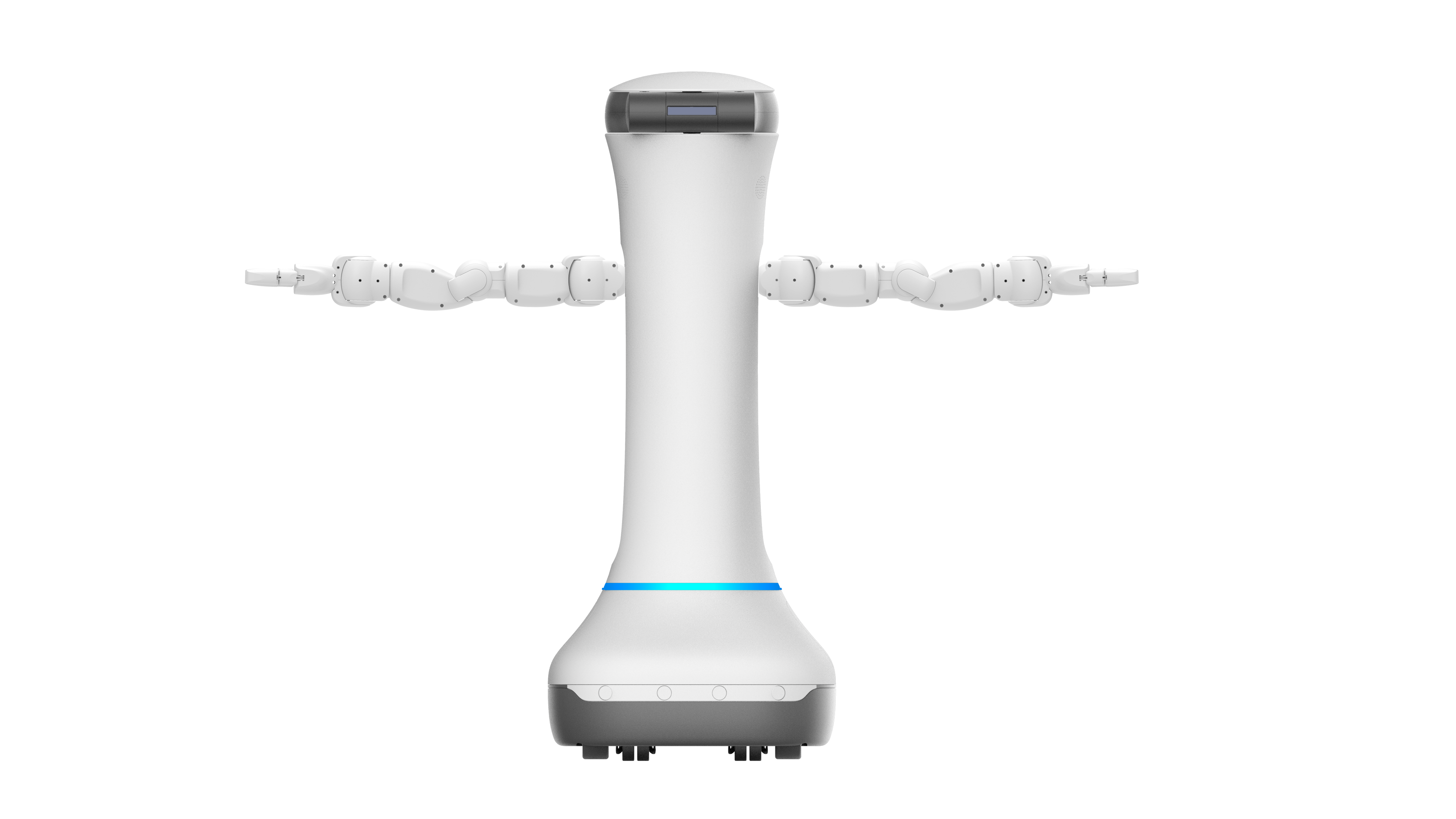
机器人手臂所有关节符合机器人坐标系, 下图为机器人整体图,所有关节处于零位。
左臂所有关节处于零点如下图所示:
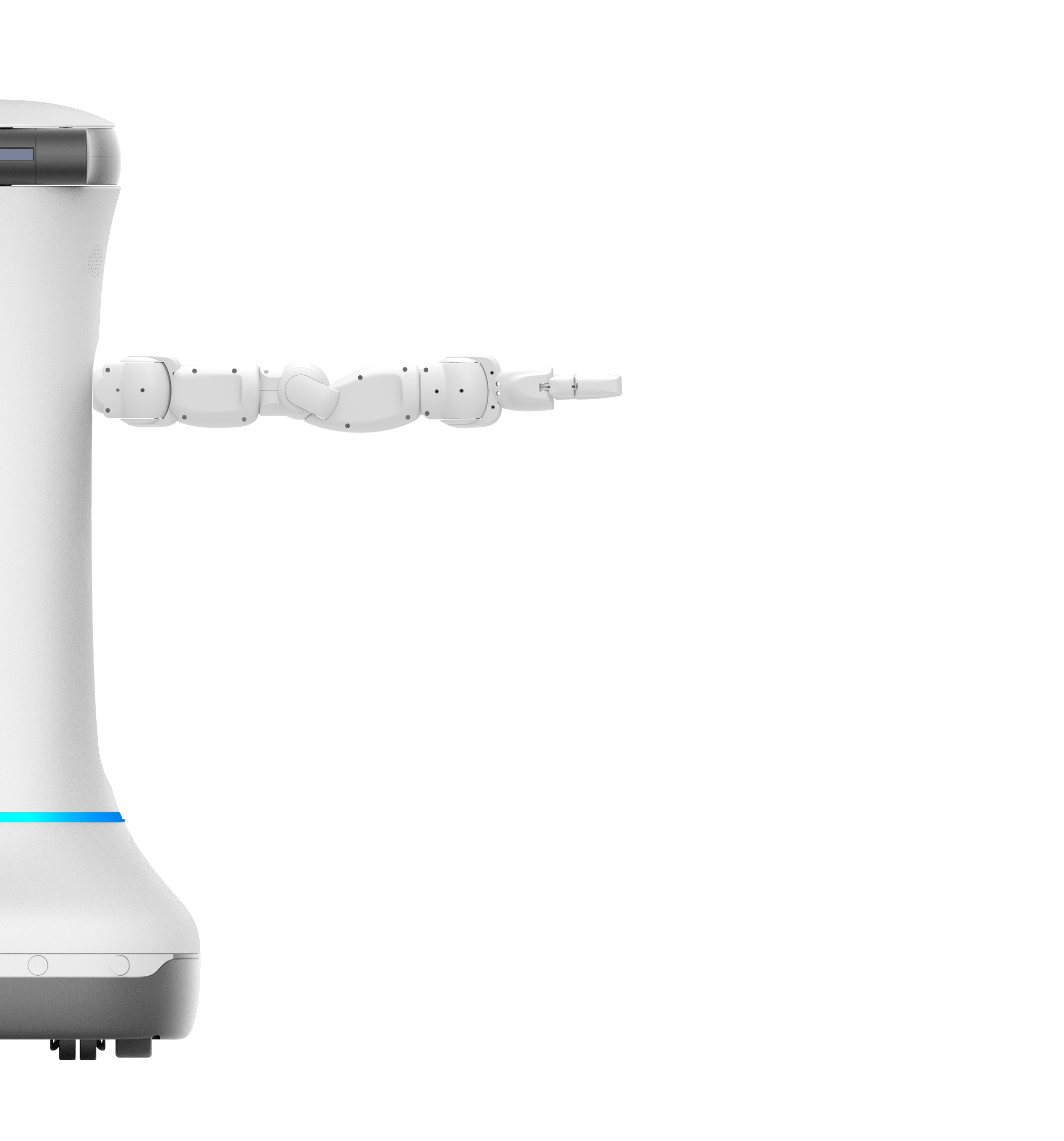
右臂所有关节处于零点如下图所示:

肩部关节:滑动关节,链接基座与肩部云台,坐标系原点在肩部云台几何中心,向上为正。
第一关节:旋转关节,链接肩部云台与手臂一号舵机,坐标系原点在第一舵机主舵盘几何中心,坐标系正方向为:X轴直面向内,Y轴垂直向下,Z轴沿机器人坐标系Y轴正方向。
第二关节:旋转关节,链接手臂一号舵机与手臂二号舵机,坐标系原点在二号舵机主舵盘几何中心,坐标系正方向与参考坐标系相同;
第三关节:旋转关节,链接手臂二号舵机与手臂三号舵机,坐标系原点在三号舵机主舵盘几何中心,坐标系正方向为:X轴指面向内,Y轴垂直向下,Z轴沿机器人坐标系Y轴正方向;
第四关节:旋转关节,链接手臂三号舵机与手臂四号舵机,坐标系原点在四号舵机主舵盘几何中心,坐标系正方向为:X轴垂直向下,Y轴与机器人坐标系Y轴相同,Z轴直面向内;
第五关节:旋转关节,链接手臂四号舵机与手臂五号舵机,坐标系原点在五号舵机主舵盘几何中心,坐标系正方向为:X轴直面向内,Y轴垂直向下,Z轴沿机器人坐标系Y轴正方向;
第六关节:旋转关节,链接手臂五号舵机与手臂六号舵机,坐标系原点在六号舵机主舵盘几何中心,坐标系Z轴正方向与机器人Z轴坐标系相同;
左臂坐标系与右臂一致。
5. 图像坐标系
| 轴定义 | 含义 |
|---|---|
| X | 在矩形图像中以水平向右为图像坐标系X轴正方向 |
| Y | 在矩形图像中以垂直向下为图像坐标系Y轴正方向 |
| 原点 | 以矩形图像中左上角像素点为图像坐标系原点 |